Dự Án
SLAM 3D rừng tìm khoảng trống bố trí công trình
Công ty TNHH Hợp Nhất Bách Việt thực hiện hạng mục SLAM scan 3D rừng phục vụ thiết kế, bố trí công trình dưới tán rừng cho dự án thuê môi trường rừng tại Xuyên Mộc Dự án thực hiện tại Khu Bảo tồn Thiên nhiên Bình Châu – Phước Bửu.
Nội dung công việc SLAM 3D rừng tìm khoảng trống bố trí công trình
Scan 3D bằng thiết bị SLAM LiGrip O1 lite của hãng GreenValley International Inc (GVI). Scan 20 Ha rừng tự nhiên dày đặt cây và dây leo.
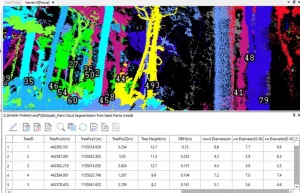
Scan xác định vị trí cây có đường kính trên 10cm, chiều cao tán cây và vị trí cây một cách chính xác
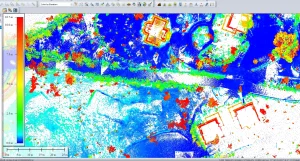
Trích xuất dữ liệu bề mặt địa hình thành lập bản đồ địa hình
Xuất vị trí bổ túc hồ sơ lập bản đồ hiện trạng rừng có kết hợp dữ liệu UAV.
Nội dung công việc đánh giá hiện trạng rừng
Theo bản đồ hiện trạng rừng khu vực dự án được điều tra vào năm 2012 thì trên diện tích 20,212ha được phân chia thành 11 lô trạng thái, trong đó khoảnh 5 có 03 lô (lô 5, 6 và 8); khoảnh 6 có 05 lô (lô 1, 2, 3, 4 và 7); khoảnh 10 có 03 lô (lô 9, 10 và 11). Theo kết quả kiểm kê rừng năm 2016, trên diện tích dự án có 56 lô rừng, trong đó: khoảnh 5 có 25 lô; khoảnh 6 có 19 lô và khoảnh 10 có 14 lô.
Tuy nhiên, dựa trên ảnh vệ tinh từ Google Earth và điều tra thực địa tiến hành phân chia thành 26 lô trạng thái tại khoảnh 5, 6 và 10 tiểu khu 30 thuộc phân khu dịch vụ hành chính Khu bảo tồn thiên nhiên Bình Châu – phước Bửu nằm trên địa giới hành chính của 02 xã Bưng Riềng và Bông Trang, trong đó trên địa giới hành chính xã Bưng Riềng gồm có khoảnh 6 được chia thành 06 lô được đánh số thứ tự lô từ 1 đến 6; trên địa giới hành chính xã Bông Trang gồm 03 khoảnh (khoảnh 5, 6 và 10), khoảnh 5 được chia thành 10 lô được đánh số thứ tự lô từ 1 đến 10; khoảnh 6 được chia thành 04 lô được đánh số thứ tự lô từ 1 đến 4 và khoảnh 10 được chia thành 06 lô được đánh số thứ tự lô từ 1 đến 6.
Dựa trên kết quả khảo sát địa hình UAV kết hợp bản đồ hiện trạng rừng được điều tra vào năm 2012 và kết quả kiểm kê rừng năm 2016 xác định trong khu vực 20,212ha có duy nhất nhóm trạng là rừng lá rộng thường xanh (ký hiệu TX).
Hình ảnh scan 3D bằng SLAM lập bản đồ hiện trạng rừng




Chúng tôi là công ty cung cấp dịch vụ scan 3D địa hình bằng SLAM tại Việt Nam.